
Zderzenia sprężyste
W zderzeniu sprężystym energia kinetyczna układu ciał przed zderzeniem jest równa energii kinetycznej obu ciał po zderzeniu

czyli

lub po uproszczeniu
 (1)
(1)
Równocześnie obowiązuje zasada zachowania pędu, co można wyrazić wzorem
 (2)
(2)
Warto zwrócić uwagę, że o ile w tym równaniu niektóre składniki mogą być ujemne, ponieważ pęd jest wektorem i może mieć różne zwroty, to w równaniu (1) wszystkie energie są zawsze dodatnie, ponieważ energia kinetyczne nie może być ujemna.
Jeżeli znane są masy ciał  ,
,  i ich prędkości początkowe
i ich prędkości początkowe  oraz
oraz  , to możemy wyznaczyć prędkości końcowe obu ciał
, to możemy wyznaczyć prędkości końcowe obu ciał  oraz
oraz  . Można to zrobić rozwiązując układ równań (1) i (2), wówczas
. Można to zrobić rozwiązując układ równań (1) i (2), wówczas
 + 2{m_2}{v_2}}}{{{m_1} + {m_2}}},") (3)
(3)
 + 2{m_1}{v_1}}}{{{m_1} + {m_2}}}.") (4)
(4)
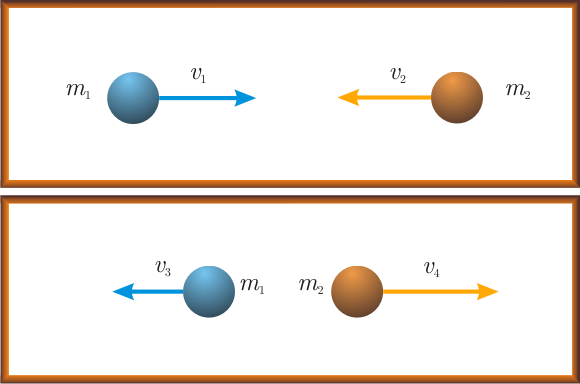
Jeżeli prędkości będą miały inne zwroty, to nie trzeba od nowa rozwiązywać układu równań (1) i (2) wystarczy zmienić znaki przy odpowiednich prędkościach we wzorach (3) i (4). Na przykład dla sytuacji z rysunku,
w porównaniu z poprzednią sytuacją uległy zmianie zwroty prędkości i , więc we wzorach (3) i (4), należy zastąpić je wyrażeniami  i
i  . Zatem
. Zatem
 + 2{m_2}\left( { - {v_2}} \right)}}{{{m_1} + {m_2}}},")
 + 2{m_1}{v_1}}}{{{m_1} + {m_2}}}.")